Modification d’un servomoteur
Modification d’un servomoteur pour en faire un servomoteur (servo) à rotation continue.
Introduction
La modification du servomoteur se fait sur un servo complet et prêt à fonctionner.
Le servomoteur, une fois modifié, permet de faire tourner les roues d’un robot ou de produire des mouvements continus.
Les servomoteurs livrés (quelque soit la marque) autorisent un rotation d’environ 180°. Ils ont une bride mécanique, qu’il faut impérativement enlever.
De plus, il faut l’étalonner et bloquer le potentiomètre pour pouvoir le faire tourner dans un sens comme dans l’autre à partir d’un automate (autoprog utilisant un picaxe).
Ces modifications sont très simples à réaliser. Il est toutefois préférable que l’enseignant réalise ces opérations.

Démontage du servomoteur
- Retirer les quatre vis sous le servomoteur.
- séparer le carter supérieur du reste.
- enlever les roues dentées.

Débrider le servomoteur
- couper la bride sur la roue de sortie du servomoteur (à l’aide d’un cutter).
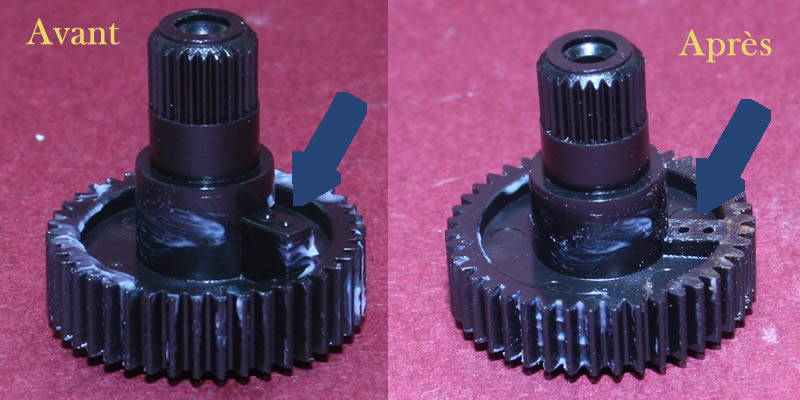
- couper et limer la tige du potentiomètre (celle-ci ne doit surtout pas dépasser de son logement).

- Etalonner le servomoteur en utilisant le programme Logicator suivant.
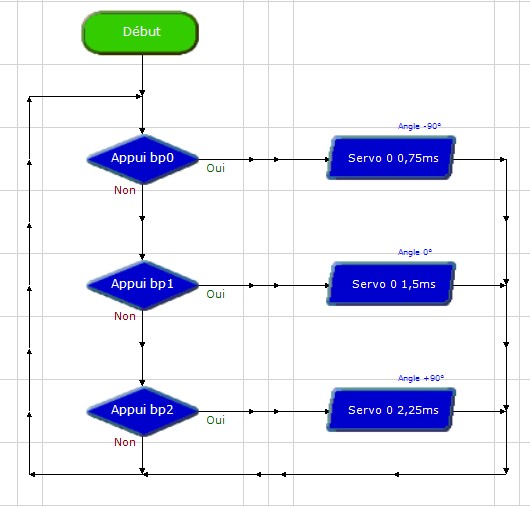 Le programme, une fois chargé dans Autoprog, permet d’étalonner le servomoteur (celui-ci ne doit pas tourner pour une durée de 1,5 ms ou une valeur de 150). C’est le point neutre.
Le programme, une fois chargé dans Autoprog, permet d’étalonner le servomoteur (celui-ci ne doit pas tourner pour une durée de 1,5 ms ou une valeur de 150). C’est le point neutre.
Pour faire tourner le servomoteur dans un sens, remplacer 150 par 75. Pour le faire tourner dans le sens inverse, remplacer 150 par 225.Bloquer le servomoteur
Lorsque le servomoteur est connecté à son circuit et que le programme est téléchargé, il est fort probable qu’il se mette à tourner. Tournez le potentiomètre (la tige coupé), avec la pointe du cutter, afin de réduire la vitesse de rotation, puis faire en sorte de neutraliser la rotation du servo.
Puis mettre une goutte de superGlue pour le stopper définitivement.
Une fois le servo stoppé, il ne reste plus qu’à remonter le servomoteur.
 N’oubliez pas d’indiquer que ce servomoteur est en rotation continue (RC).
N’oubliez pas d’indiquer que ce servomoteur est en rotation continue (RC).

En conclusion
Il est possible que l’étalonnage soit faussé (faible rotation) au bout de plusieurs utilisations, voire même lorsque le servomoteur est remonté. Ce n’est pas grave. Il suffira de jouer sur la programmation pour contrer le défaut. De même, si le robot est trop lourd, il est fort probable qu’il dévie de sa trajectoire. Dans ce cas, il n’y a pas ou peu de solution. Je conseille par conséquent, de mettre des servomoteurs puissants (10Kg) au niveau des roues. Ils sont plus chers mais avec ces servomoteurs, il n’ y aura aucun problème.